论文
-
L. Han, et al. 2026. “Magnetic tensegrity-enabled robotic gripper with adaptive energy barrier for UAV perching.” Cyborg Bionic Syst., vol. 0, no. ja, Jan. 2026. doi:10.34133/cbsystems.0535.
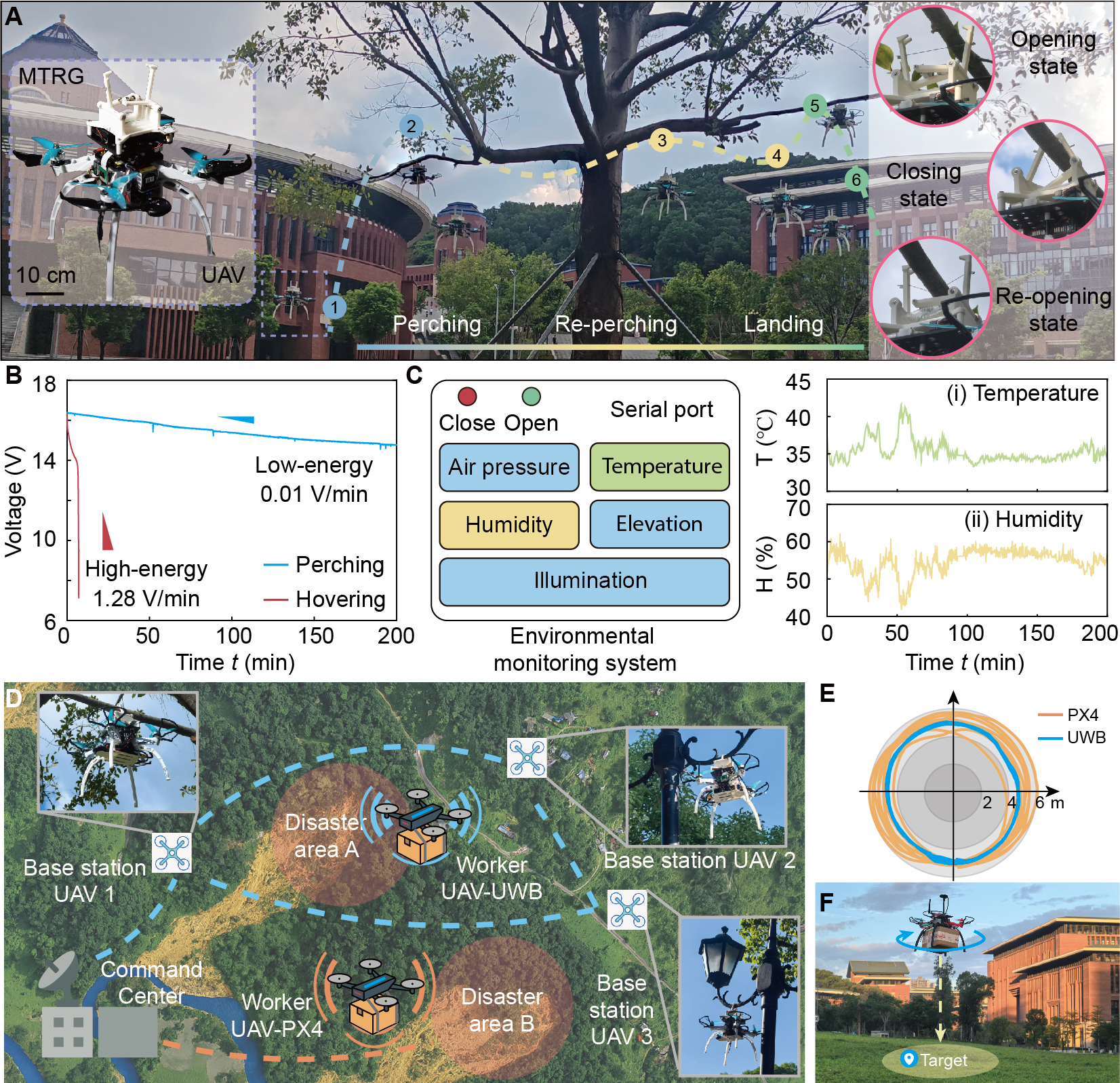 Figure 6. Magnetic tensegrity-enabled robotic gripper with adaptive energy barrier for UAV perching.
Figure 6. Magnetic tensegrity-enabled robotic gripper with adaptive energy barrier for UAV perching.
-
Xinxin Chen, Wei Jiang, Wangjie Tao, Zekai Wen, Zheng Chen, Jianying Wang, and Jianing Wu. 2025. “Flexible Filaments of a Fan Worm Make Filtration Functionally Flexible.” Cell Reports Physical Science 6(10): 102851. doi:10.1016/j.xcrp.2025.102851.
 Graphical abstract.
Graphical abstract.
项目
- 空中交互机器人项目
- 仿生界面材料与结构项目
- 多机器人协作制造平台